Robots I have built:
Lasermouse
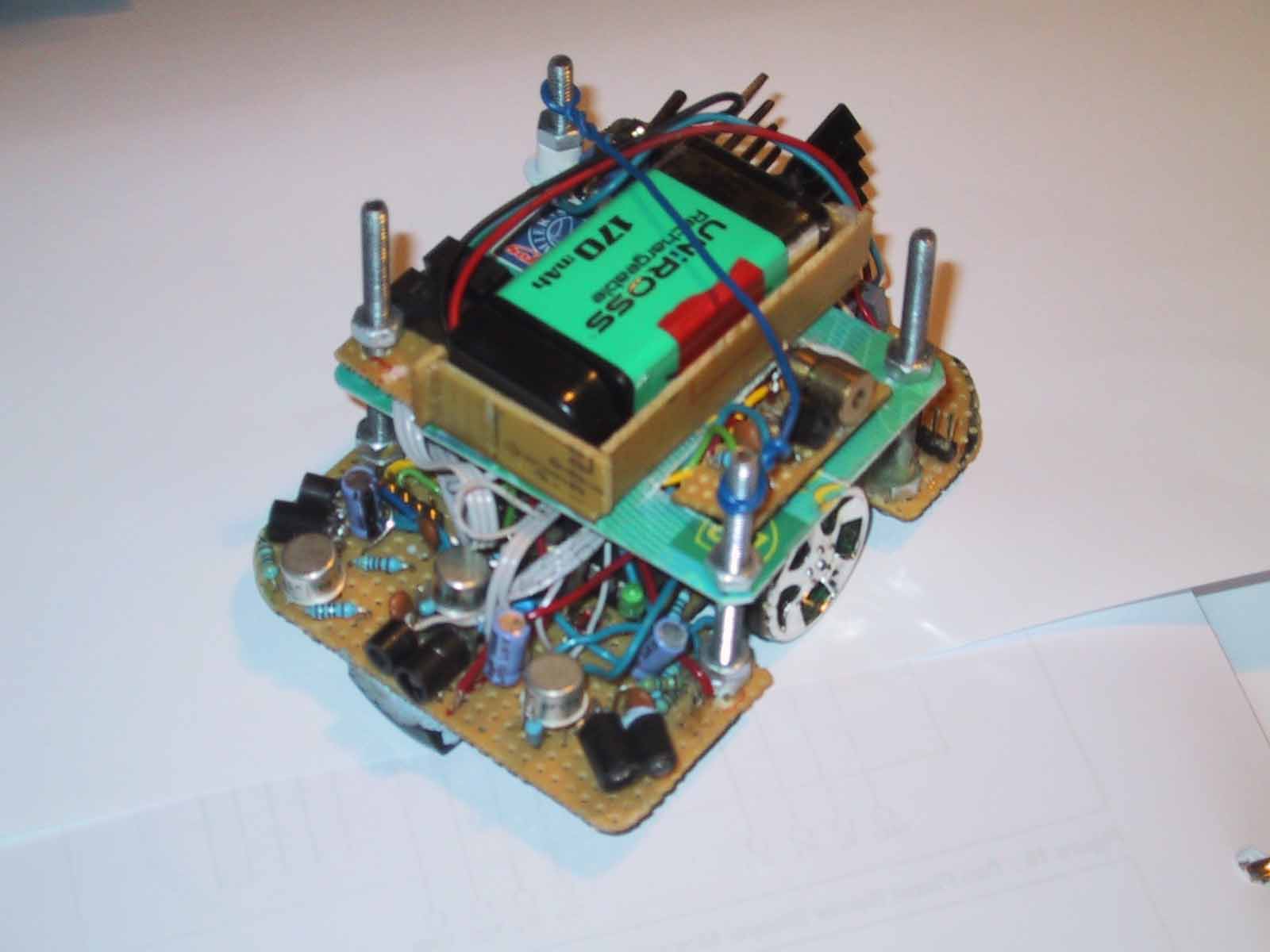
For the 2006 UK national micromouse competition I built lasermouse
This is a very small and quite fast wall following mouse with 3 LED wall sensing beams at the front and a laser at the side all measuring wall distances, and onboard wheel speed sensing for excellent speed control
In the non contact wall following national competition final in June 2006 it was the fastest to the centre but incurred a 3 second penalty for needing a touch after hitting the wall in the final cell before the centre, and so came in overall second in the competition. However in the November competition it redeemed itself and came first.