Robots I have built:
More micromouse
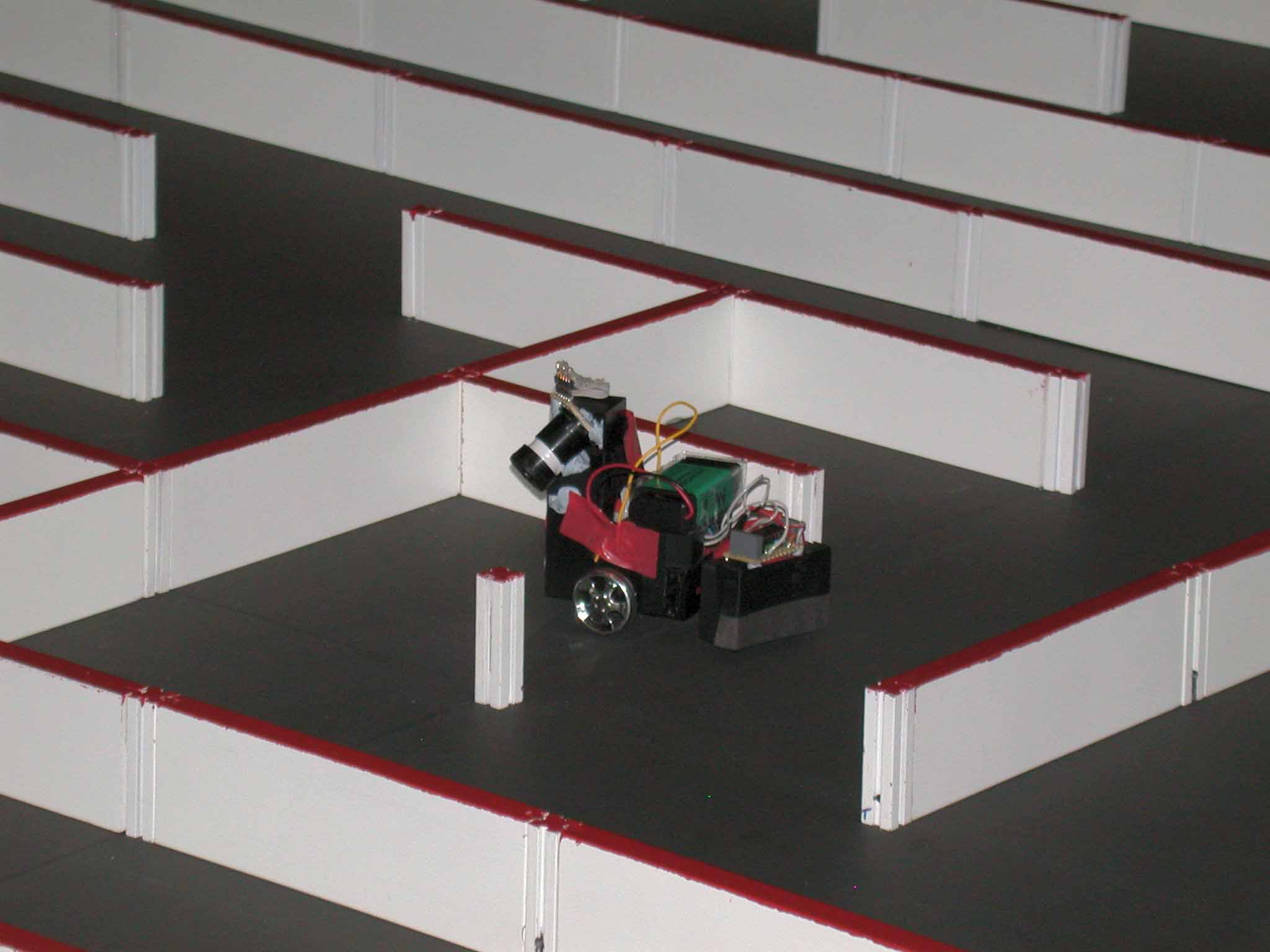
I also entered another mouse for 2005 that I had built by then which has a number of interesting features including a linear optical array being used to passively sense the wall positions by the diffrence in colour of the walls and floor, ultrasonic sensing of the wall ahead and a trailer towed behind that measured the actual speed over the ground
Here it is at the centre of the maze after getting there without touching any of the walls on the way ( a non contact wall follower)
Here is a closer view which shows a bit more detail.
