Robots I have built:
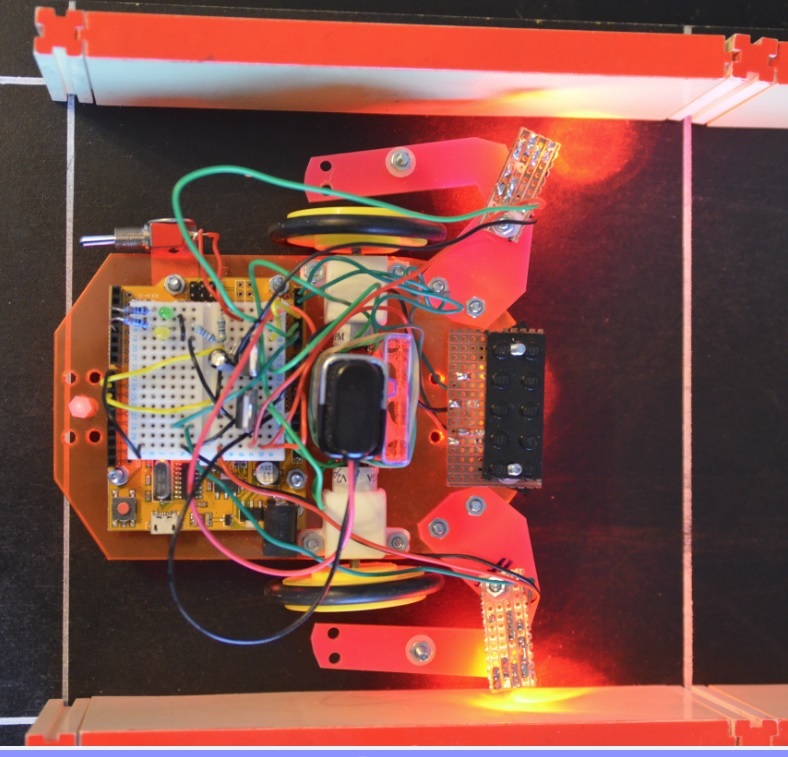
This robot was developed for use at KES school to perform the Micromouse and IET challenges of line and wall following. The chassis was designed using CAD and laser cut out of perspex
The processor uses an Arduino Uno clone driving a pair of Field Effect Trannsistor (FET) switches mounted on a prototyping board, for motor control. The sensors at the front under the black square are the two line following sensors. The sensors at the side are used for wall following. It was programmed in Sketch on the Arduino.