Robots I have built:
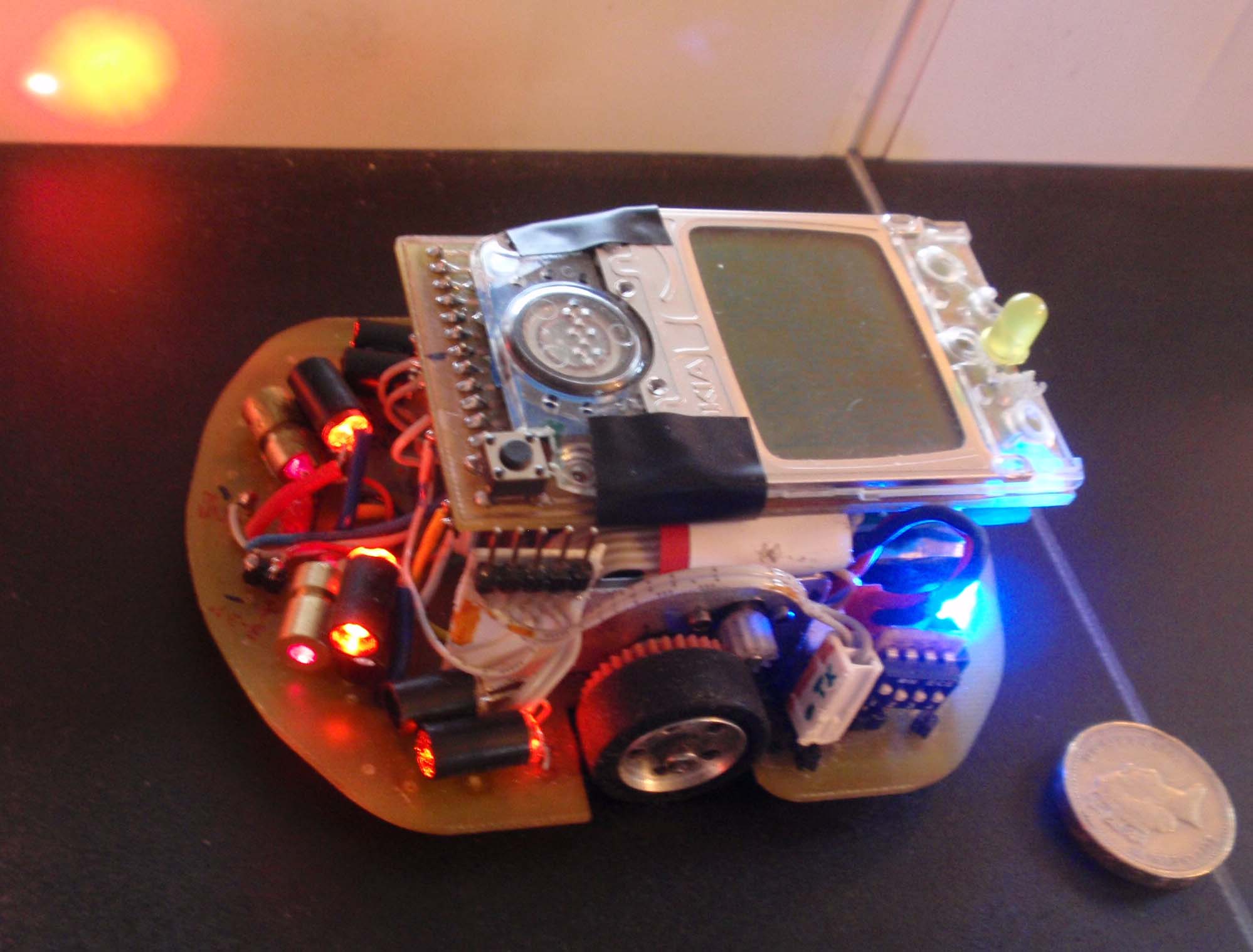
Mouse 7 was built later in 2009 and uses the Faulhaber motors from Mouse 5 - So mouse 5 is no more - RIP
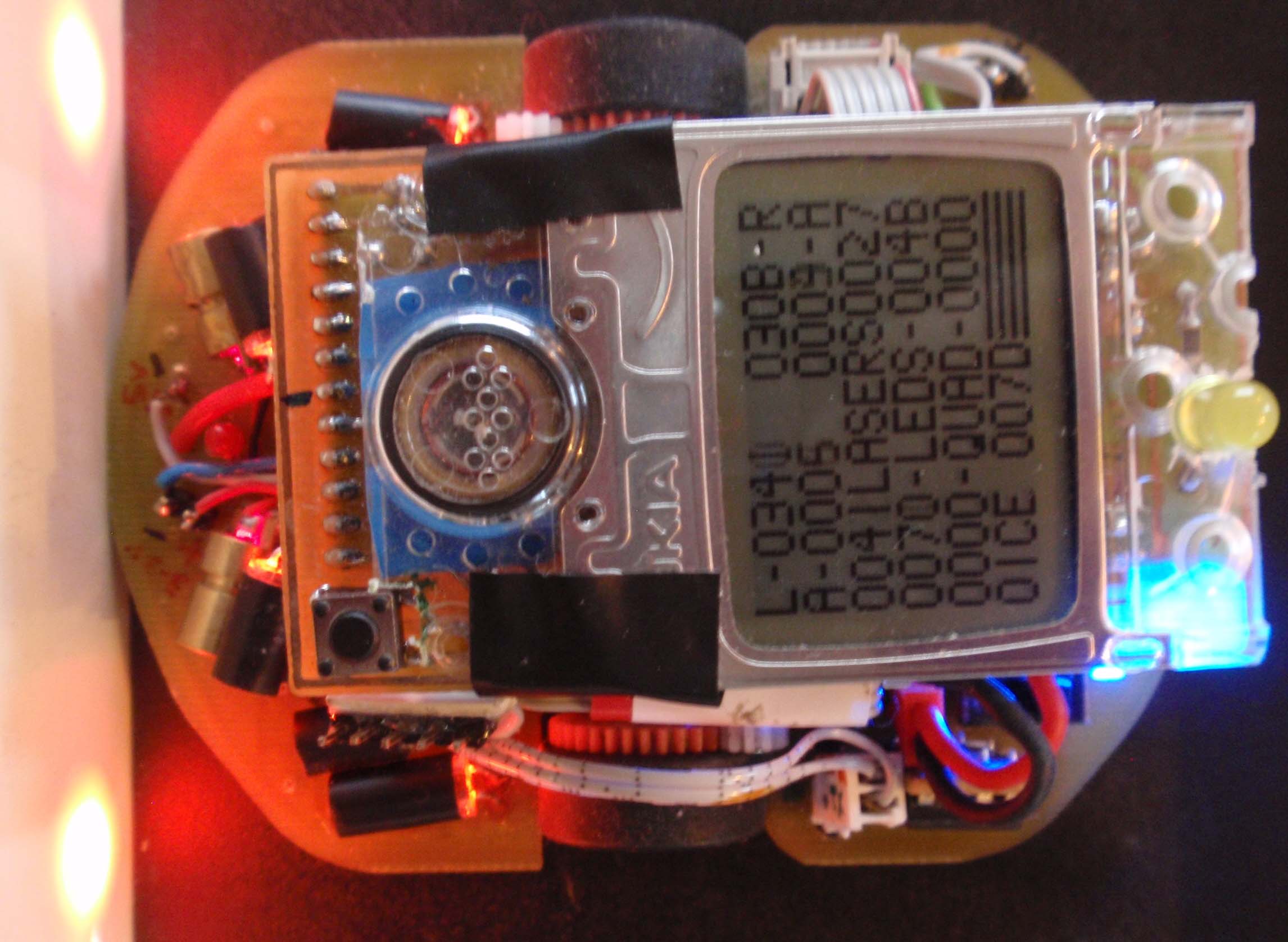
It uses a dsPIC 33F128MC804 processor which has the great advantage of having 2 quadrature encoder modules built into the processor which track how far each wheel has turned. A combination of LED and laser sensors are used (see large and small spot on wall) to get the high response of the LEDs and the accuracy of the lasers
It has an ADIS16250 Gyro at the rear; and has the display and speaker from a Nokia 3310 phone on top so that I can see what is happening. this shows me values of all the sensors and the counts from the quadrature encoders on the motors. I can also link the mouse to a USB port on my PC to collect and analyse data logged during a run or a test. As this processor uses a different assembler language to the previous PIC micros that I have used I had a major rewrite of the software to do, so neither this one nor Mouse 6 was really ready for the 2009 competitions, but it did manage a 2nd place in the June National wall follower competition and a slightly poorer 3th in November 2009
But I am hopeful for completing a competitive maze solver run in November 2010.