Robots I have built:
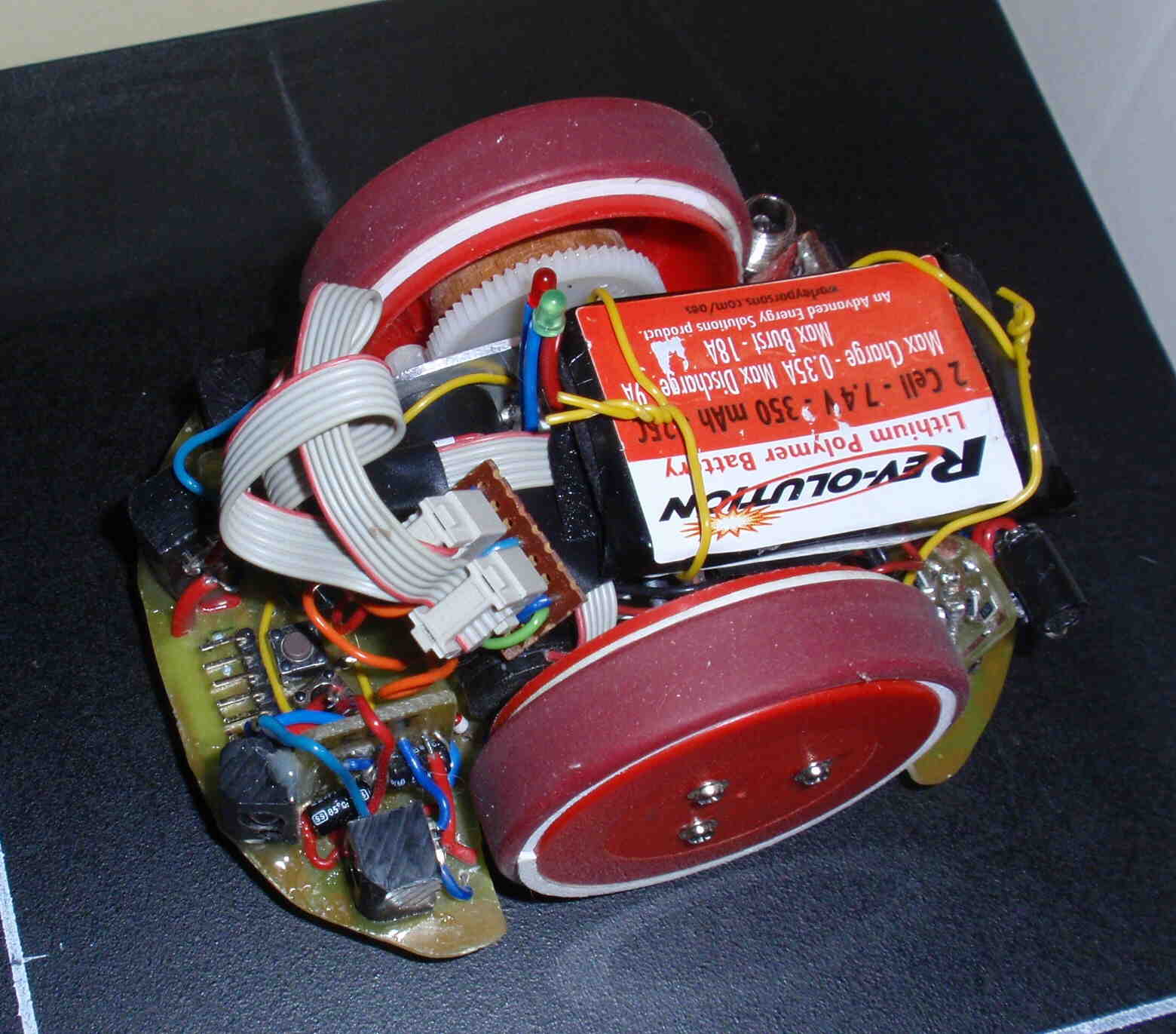
Mouse 5 - called Lucky
This mouse was intended to be a non contact wall follower and a full maze solver. With Faulhaber motors, a PIC 18F4525 processor and lithium Polymer battery it has the potential to be fast and competitive.
It is a fast non-contact wall follower which managed a third place in the National 2008 competition in June and a second place in November, but was still too slow and unreliable on wall sensing in full maze solving mode.