Robots I have built:
A two inch mouse
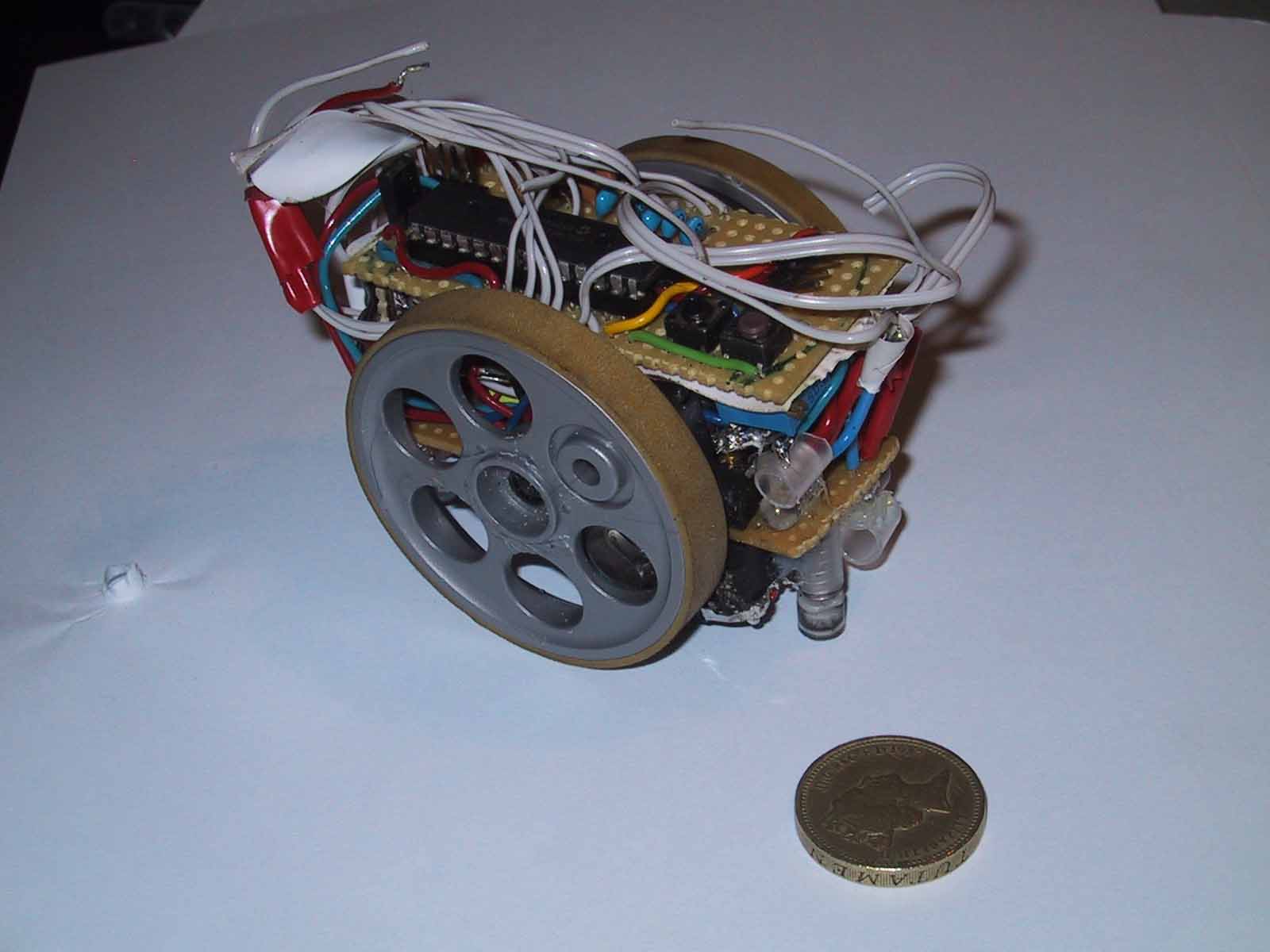
As part of experiments to see how small I could make a mouse I put together a very small non contact mouse. It was just 5 cms wide, 5 cms high and 7 cms long. This was quite a challenge as once the wheels had been taken out of the way it left an area of 3cm by 7cm into which to cram 2 motors & gearboxes, a battery, 2 power regulation systems (one for the motors and one for the computer), the 18F252 PIC processor, two optical wheel speed sensing systems and 5 LED & phototansistor wall sensors. Unfortunately the speed sensing was not very reliable and while the narrow wheelbase gave it lots of room to manoeuver in the maze it was a bit unstable on the corners. so this one will probably go no further.