Robots I have built:
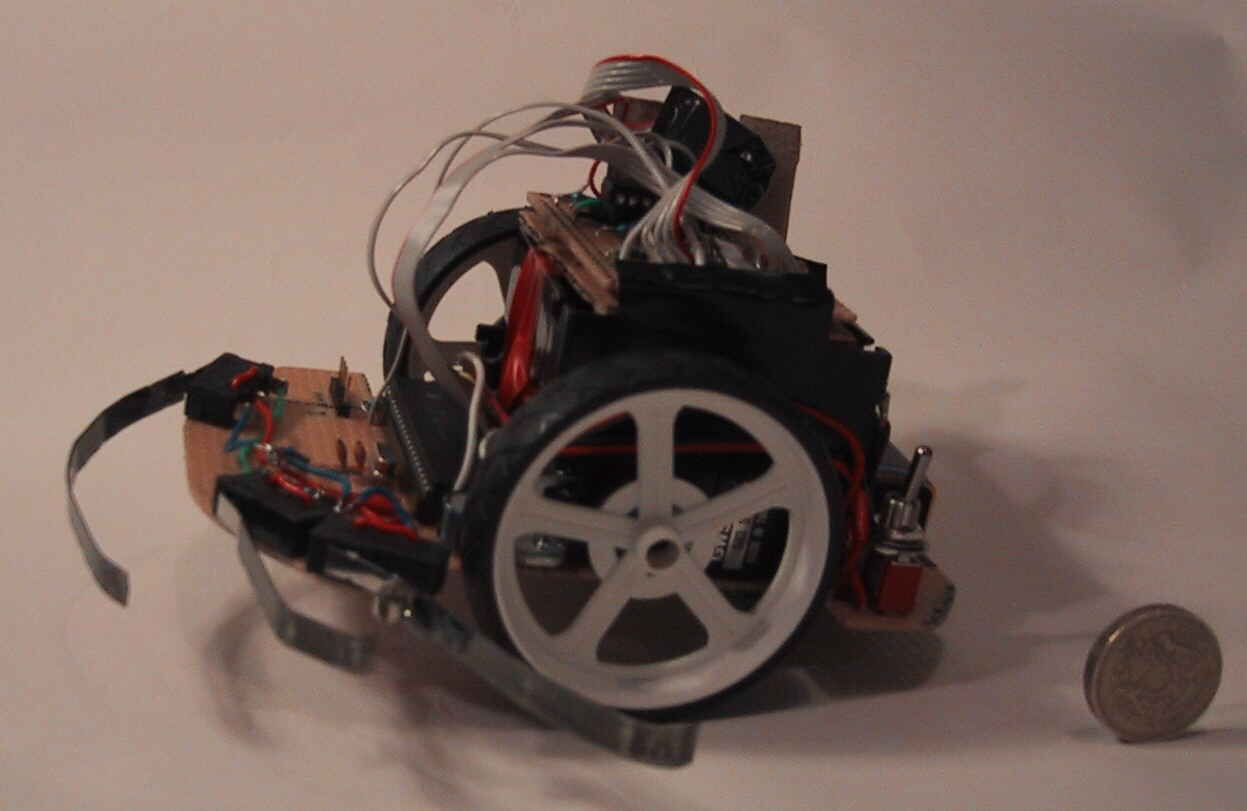
My first Micromouse maze runner
This is basically a contact wall follower - built in a couple of weekends after visiting the 2004 UK natonal micromouse competition at the Technology Innovation Centre in Birmingham.
It has 2 standard servo motors driving the wheels, a PIC 16F877 microcontroller for the logic and used 3 microswitches to detect the walls.
The assembly on the top of this picture shows it also being used as a test bed for a miniture vision system - to detect the wall distance
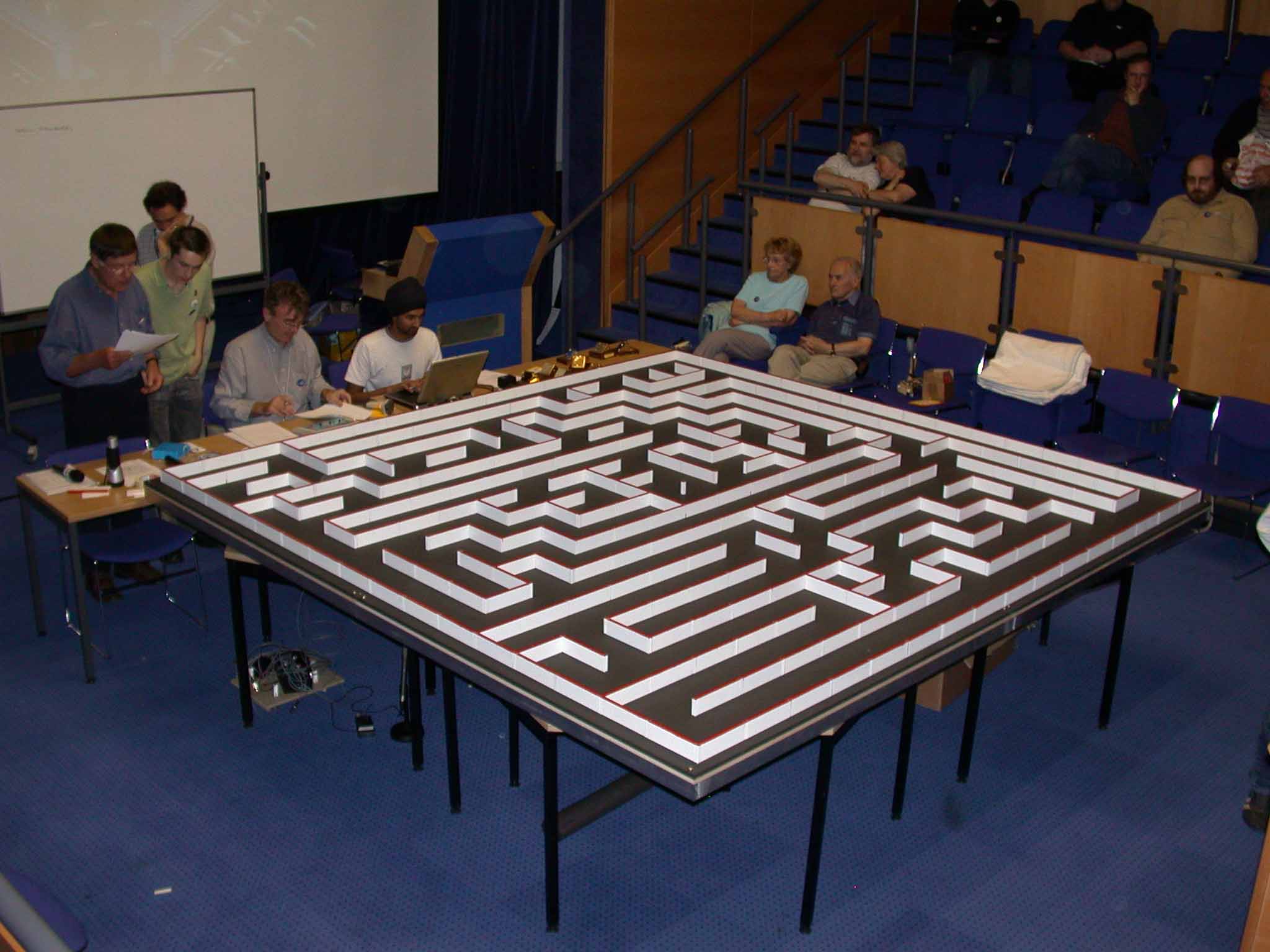
If you are wondering what a competition maze looks like here is one set up for the 2005 competition.
It is 3 meters square and has 256 cells in it.You start at one corner (top left) and have to get to the middle
In 2005 my servo based Micromouse (Flash Mouse) competed in the national finals and although it was one of the slowest it achieved my main goal of at least getting to the centre of the maze by following the left wall
It sported a multi colour flashing light stick for fun (courtesy of half of a Siemens promotional pen) and this won me a prize for the flashiest robot.
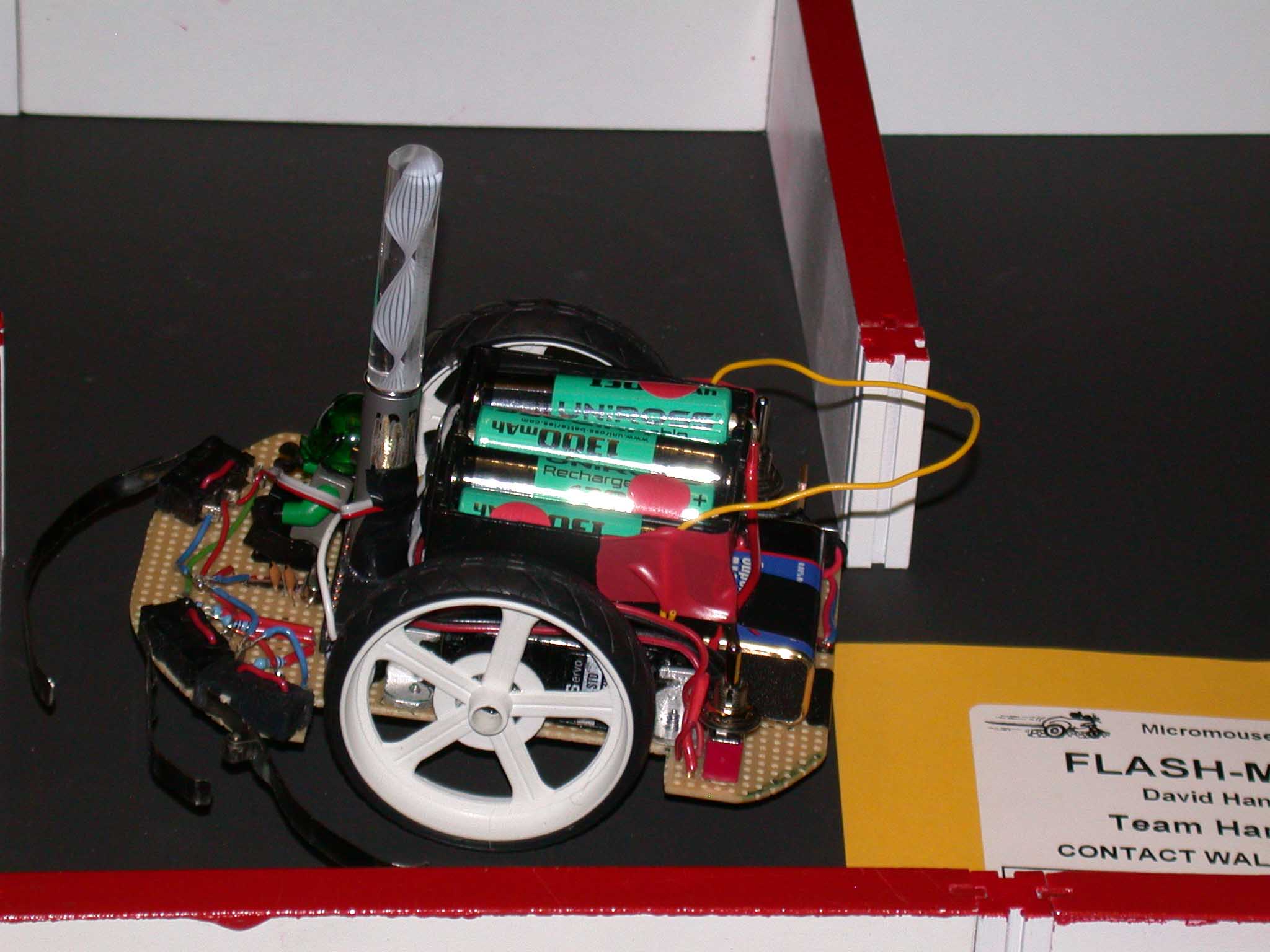
Subsequent modifications were made to this robot for the 2006 national cmpetition to add an LED and phototransistor to replace the microswitches to turn it into a non contact wall follower, which although still slow was now able to get through the maze with minimal contact with the walls. it won a technical innovation prize for getting to the centre without wall contact with just one diagonally facing sensor which was able to detect both a wall to the side and a wall ahead.