Robots I have built:
This direct drive line tracker was built to demonstrate how a low cost simple line follower could be built using simple stripboard electronics, an extremely simple drive system and programmed using the Microchip MPLAB programming environment.
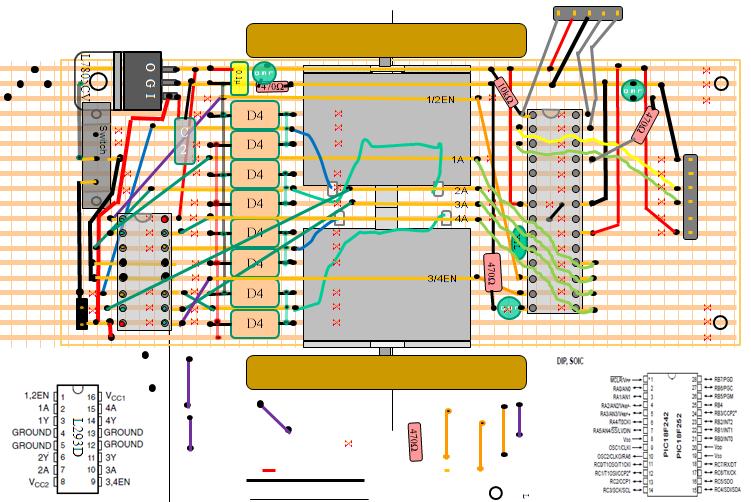
The microprocessor is a Microchip PIC18F252 which is coded using the free Microchip MPLAB assembler development environment. A PicKit 2 is used to transfer the code from a PC into the PIC on the line follower.
The only other chips on the main board are a 5 volt regulator.and an L293D H bridge driver that allows the small signals from the PIC processor to control the larger currents required to drive the motors. A dual op amp is also used on the encoder trailer to amplify and clean up the pulses from speed measurement encoders (more below).
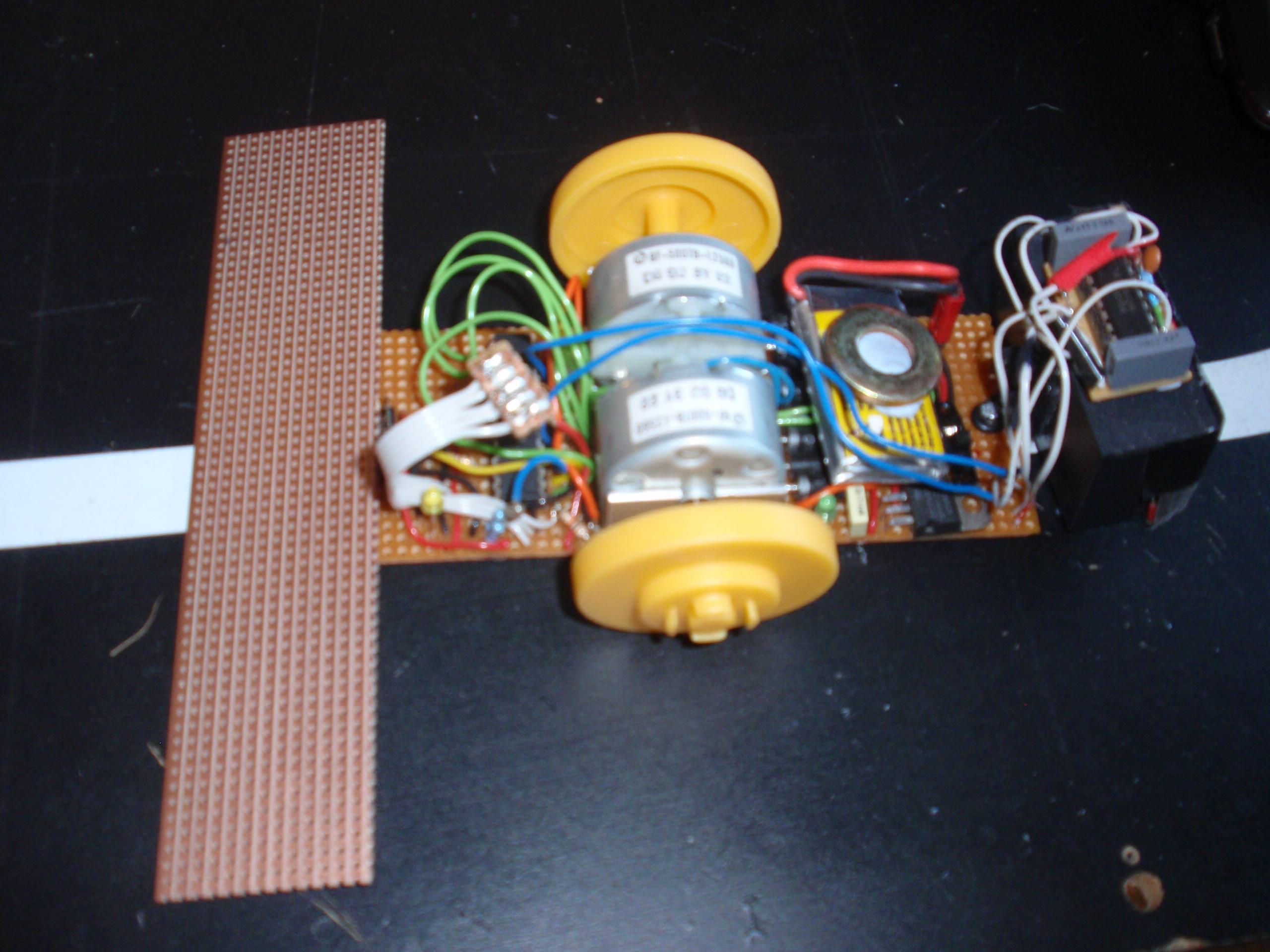
The wheels are connected directly onto the electric motor shafts, with just a piece of sleeving to convert the 2mm motor shaft to the 3mm hole in the wheels. This limits the torque available but means that a relatively high speed can be achieved.
The image shows the line follower before the front sensor strip was completed. It subsequently had 4 infra red transmitter and receiver pairs added. Two in the centre and one at each end.
Speed is measured by the small trailer containing the encoder wheels from a PC mouse running directly on the ground which sends pulses back to the PIC.
The layout of the stripboard on the main board is shown below: